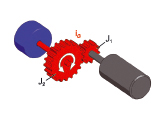
El eje de salida del motor dc mueve la carga por medio de ruedas dentadas.
El par de salida (MB) y la velocidad de salida (nB) que ha de proporcionar el motor de corriente continua, se calculan en base a la velocidad que demanda la carga (nL), el par necesario para mover dicha carga (ML) y reducción (i) conseguida mediante los engranajes.
Si existen pérdidas de potencia en los engranajes (fricción, etc…), ha de tenerse en cuenta la eficiencia (η) para seleccionar un motor dc más potente que compense estas pérdidas.
En funcionamiento intermitente (aceleraciones, cambios en la carga), la inercia de la carga (JL) juega un papel importante y ha de ser considerada en los cálculos.
Si los engranajes tienen una inercia considerable (J1, J2) , también debe ser incluida en los cálculos dinámicos.
Atención en aplicaciones de posicionamiento, donde los engranajes poseen un juego u holgura que afectará en los cambios de sentido de giro. En estos casos, el uso de poleas con correas puede minimizar este juego, con su correspondiente pretensado, siempre por debajo de las máximas fuerzas radiales que puedan soportar los rodamientos del motor corriente continua.
Haga clic para ampliar la imagen
Ejemplo: Se necesita mover una carga con un par resistente de 1,5 Nm a una velocidad de 1.000 rpm, utilizando unos engranajes de relación de reducción 4 a 1 debido al diseño constructivo compacto de la máquina. El fabricante de los engranajes nos indica que el tallado de los flancos de los dientes es de alta calidad y tienen un rendimiento del 90 %. Calcular las prestaciones mecánicas útiles del motor (par en el motor, potencia) necesarias para girar esta carga.
Par motor Mb = ML / (i x η) Mb = 1,5 Nm / (4 x 0,9) = 0,416 Nm = 416 mNm
Velocidad del motor Nb = NL x i Nb = 1000 rpm x 4 = 4000 rpm
Potencia mecánica útil P = (π / 30000) x M x n P = 0,000105 x 416 mNm x 4000 rpm = 174 W